Working with Custom Models¶
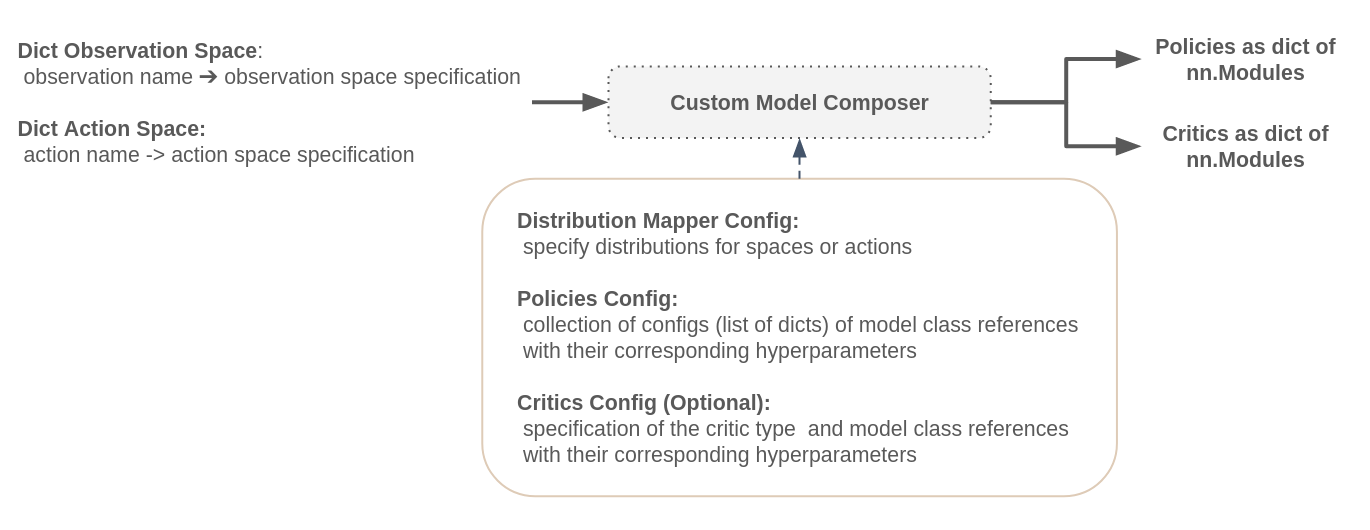
The Maze custom model composer enables us to explicitly specify application specific models directly in Python. Models can be either written with Maze perception blocks or with plain PyTorch as long as they inherit from Pytorch’s nn.Model.
As such models can be easily created, and even existing models from previous work or well known papers can be easily reused with minor adjustments. However, we recommend to create models using the predefined perception blocks in order to speed up writing as well as to take full advantage of features such as shape inference and graphical rendering of the models.
On this page we will first go over the features as well as general working principles. Afterwards we will demonstrate the custom model composer with three examples:
A simple feed forward model for cartpole.
A more complex recurrent network example.
The cartpole example again but this time using plain PyTorch (that is, no Maze-Perception Blocks).
List of Features¶
The custom model composer supports the following features:
Specify complex models directly in Python.
Supports shape inference and shape checks for a given observation space when relying on Maze perception blocks.
Reuse existing PyTorch nn.Models with minor modifications.
Stores a graphical rendering of the networks if the inference block is utilized.
Note
All model composers have the single purpose of composing, testing and visualizing the models in code or from a config file. After all models have been created and retrieved the model composer will have served its purpose and is deleted.
The Custom Models Signature (on Action and Observation Shapes)¶
As previously mentioned the constraints we impose on any model used in conjunction with the custom model composer are twofold: Firstly the network class has to inherit from PyTorch’s nn.Model in order to inherit all network specific methods and properties such as the forward method. Additionally a given network class has to have specified constructor arguments depending on the type of network.
Policy Networks must have the constructor arguments obs_shapes and action_logits_shapes. When the models are built in the constructor of the custom model composer these two arguments are passed to the constructor of the model in addition to any other arbitrary arguments specified. As the name suggests obs_shapes is a dictionary mapping observation names to their corresponding shapes represented as a sequence of integers. Similarly action_logits_shapes is a dictionary that maps action names to their corresponding action distribution logits shapes. (These shapes are also represented as a sequence of integers.) Both, observation and action logits shapes are inferred in the model composer utilizing the observation_spaces_dict, action_spaces_dict and distribution_mapper.
Critic Networks require only the constructor argument obs_shapes. Any other constructor argument is free for the user to specify.
To summarize the constraints we impose on custom models:
Example 1: Simple Custom Networks with Perception Blocks¶
Even though designed for more complex models that process multiple observations and predict multiple actions at the same time you can also compose models for simpler use cases, of course.
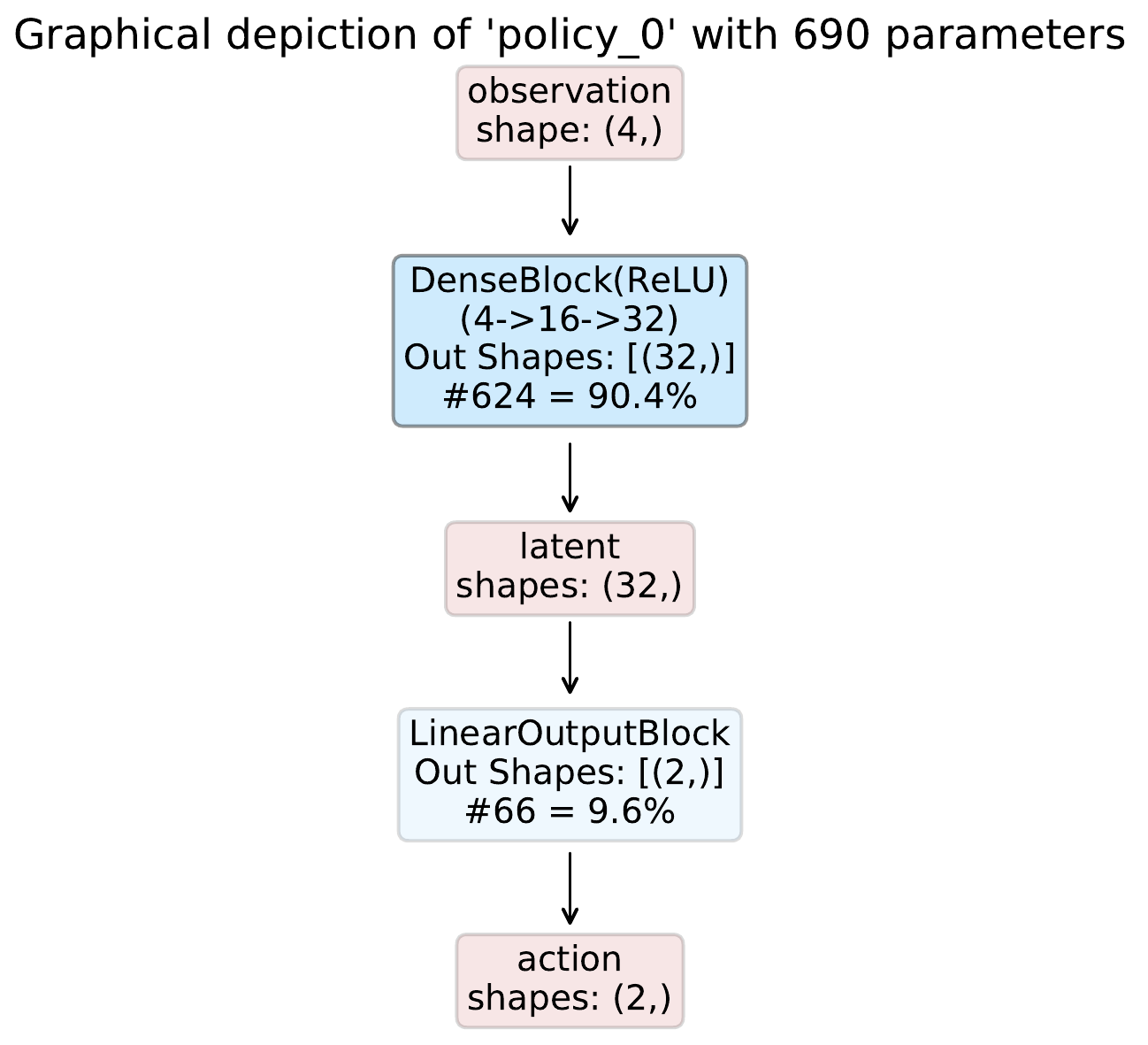
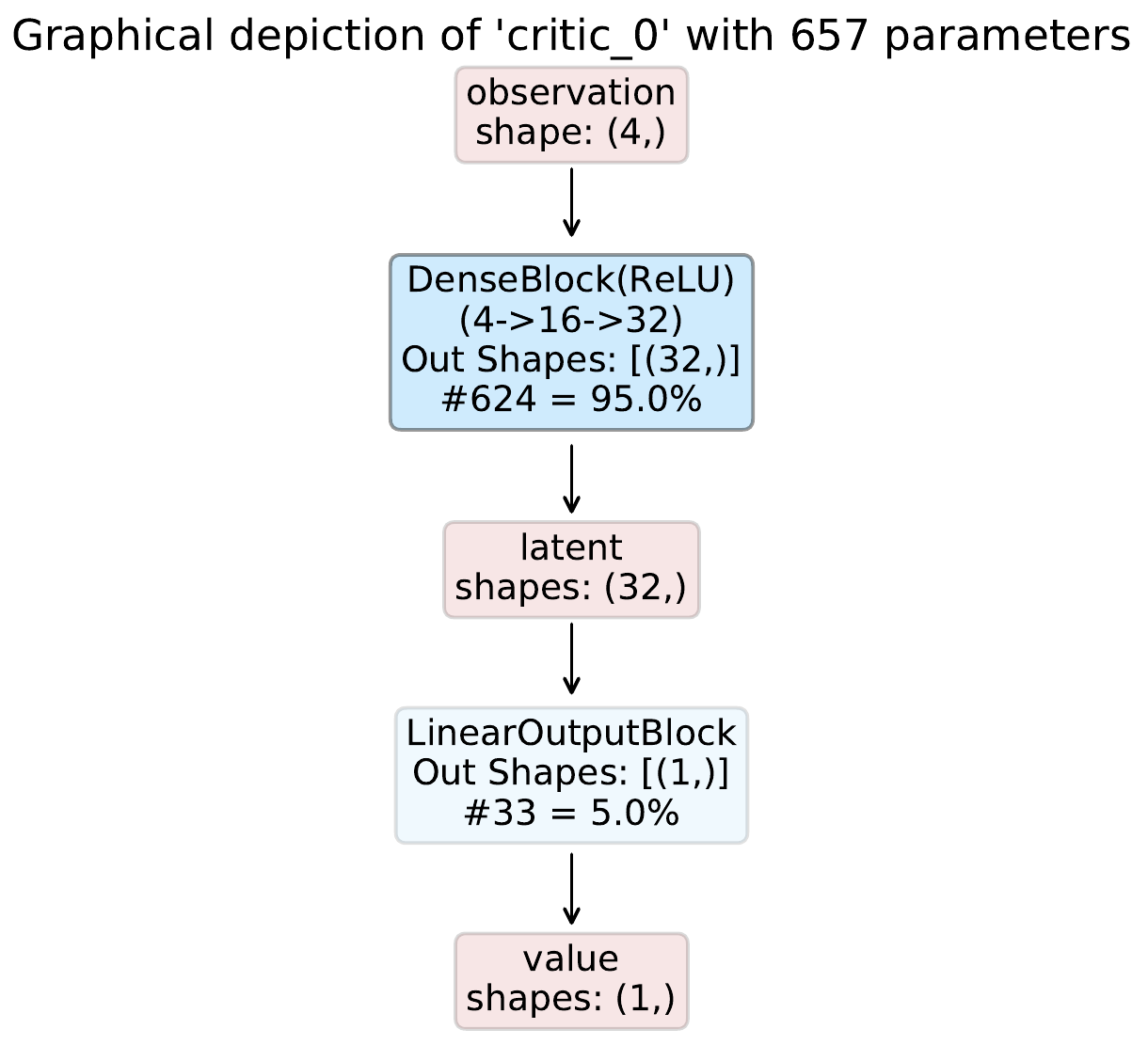
In this example we utilize the custom model composer in combination with the perception blocks to compose an actor-critic model for OpenAI Gym’s CartPole Env using a single dense block in each network. CartPole has an observation space with dimensionality four and a discrete action space with two options.
The policy model can then be defined as:
"""Shows how to use the custom model composer to build a custom policy network."""
from collections import OrderedDict
from typing import Dict, Union, Sequence, List
import numpy as np
import torch
import torch.nn as nn
from maze.perception.blocks.feed_forward.dense import DenseBlock
from maze.perception.blocks.inference import InferenceBlock
from maze.perception.blocks.output.linear import LinearOutputBlock
from maze.perception.weight_init import make_module_init_normc
class CustomCarpolePolicyNet(nn.Module):
"""Simple feed forward policy network.
:param obs_shapes: The shapes of all observations as a dict.
:param action_logits_shapes: The shapes of all actions as a dict structure.
:param non_lin: The nonlinear activation to be used.
:param hidden_units: A list of units per hidden layer.
"""
def __init__(self, obs_shapes: Dict[str, Sequence[int]], action_logits_shapes: Dict[str, Sequence[int]],
non_lin: Union[str, type(nn.Module)], hidden_units: List[int]):
super().__init__()
# Maze relies on dictionaries to represent the inference graph
self.perception_dict = OrderedDict()
# build latent embedding block
self.perception_dict['latent'] = DenseBlock(
in_keys='observation', out_keys='latent', in_shapes=obs_shapes['observation'],
hidden_units=hidden_units,non_lin=non_lin)
# build action head
self.perception_dict['action'] = LinearOutputBlock(
in_keys='latent', out_keys='action', in_shapes=self.perception_dict['latent'].out_shapes(),
output_units=int(np.prod(action_logits_shapes["action"])))
# build inference block
self.perception_net = InferenceBlock(
in_keys='observation', out_keys='action', in_shapes=obs_shapes['observation'],
perception_blocks=self.perception_dict)
# apply weight init
self.perception_net.apply(make_module_init_normc(1.0))
self.perception_dict['action'].apply(make_module_init_normc(0.01))
def forward(self, in_tensor_dict: Dict[str, torch.Tensor]) -> Dict[str, torch.Tensor]:
"""Compute forward pass through the network.
:param in_tensor_dict: Input tensor dict.
:return: The computed output of the network.
"""
return self.perception_net(in_tensor_dict)
And the critic model as:
"""Shows how to use the custom model composer to build a custom value network."""
from collections import OrderedDict
from typing import Dict, Union, Sequence, List
import torch
import torch.nn as nn
from maze.perception.blocks.feed_forward.dense import DenseBlock
from maze.perception.blocks.inference import InferenceBlock
from maze.perception.blocks.output.linear import LinearOutputBlock
from maze.perception.weight_init import make_module_init_normc
class CustomCarpoleCriticNet(nn.Module):
"""Simple feed forward critic network.
:param obs_shapes: The shapes of all observations as a dict.
:param non_lin: The nonlinear activation to be used.
:param hidden_units: A list of units per hidden layer.
"""
def __init__(self, obs_shapes: Dict[str, Sequence[int]], non_lin: Union[str, type(nn.Module)],
hidden_units: List[int]):
super().__init__()
# Maze relies on dictionaries to represent the inference graph
self.perception_dict = OrderedDict()
# build latent embedding block
self.perception_dict['latent'] = DenseBlock(
in_keys='observation', out_keys='latent', in_shapes=obs_shapes['observation'], hidden_units=hidden_units,
non_lin=non_lin)
# build action head
self.perception_dict['value'] = LinearOutputBlock(
in_keys='latent', out_keys='value', in_shapes=self.perception_dict['latent'].out_shapes(), output_units=1)
# build inference block
self.perception_net = InferenceBlock(
in_keys='observation', out_keys='value', in_shapes=obs_shapes['observation'],
perception_blocks=self.perception_dict)
# apply weight init
self.perception_net.apply(make_module_init_normc(1.0))
self.perception_dict['value'].apply(make_module_init_normc(0.01))
def forward(self, in_tensor_dict: Dict[str, torch.Tensor]) -> Dict[str, torch.Tensor]:
"""Compute forward pass through the network.
:param in_tensor_dict: Input tensor dict.
:return: The computed output of the network.
"""
return self.perception_net(in_tensor_dict)
An example config for the model composer could then look like this:
# @package model
# specify the custom model composer by reference
type: maze.perception.models.custom_model_composer.CustomModelComposer
# Specify distribution mapping
# (here we use a default distribution mapping)
distribution_mapper_config: {}
policy:
# first specify the policy type
type: maze.perception.models.policies.ProbabilisticPolicyComposer
# specify the policy network(s) we would like to use, by reference
networks:
- type: docs.source.policy_and_value_networks.code_snippets.custom_cartpole_policy_net.CustomCarpolePolicyNet
# specify the parameters of our model
non_lin: torch.nn.ReLU
hidden_units: [16, 32]
critic:
# first specify the critic type (here a state value critic)
type: maze.perception.models.critics.StateCriticComposer
# specify the critic network(s) we would like to use, by reference
networks:
- type: docs.source.policy_and_value_networks.code_snippets.custom_cartpole_critic_net.CustomCarpoleCriticNet
# specify the parameters of our model
non_lin: torch.nn.ReLU
hidden_units: [16, 32]
Details:
Models are composed by the CustomModelComposer.
No specific action space and probability distribution overrides are specified.
Since we are in a single step environment we only have one policy. Additionally we specify the constructor arguments we defined in the python code above.
For critics we specify the type to be single-step since we are working with a single step environment. Furthermore, the network and its constructor arguments are specified.
Note
Although mentioned previously, we want to point out the constructor arguments of the two models again: the policy network has the required arguments obs_shapes and action_logits_shapes in addition to the custom arguments non_lin and hidden_units. The critic network has only the required argument obs_shapes and the same custom arguments as the policy network.
The resulting inference graphs for a recurrent actor-critic model are shown below:
Example 2: More Complex Custom Networks with Perception Blocks¶
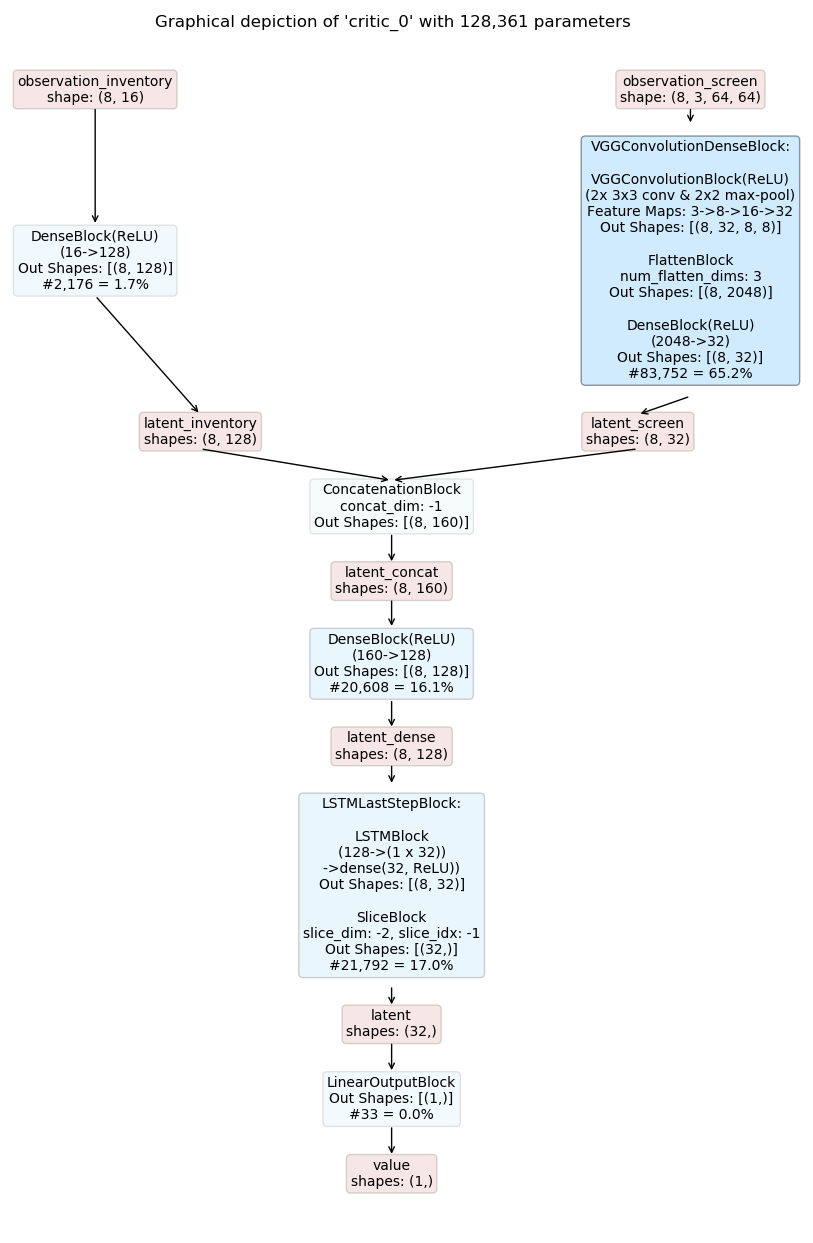
Now we will consider the more complex example used in the examples of the template model composer.
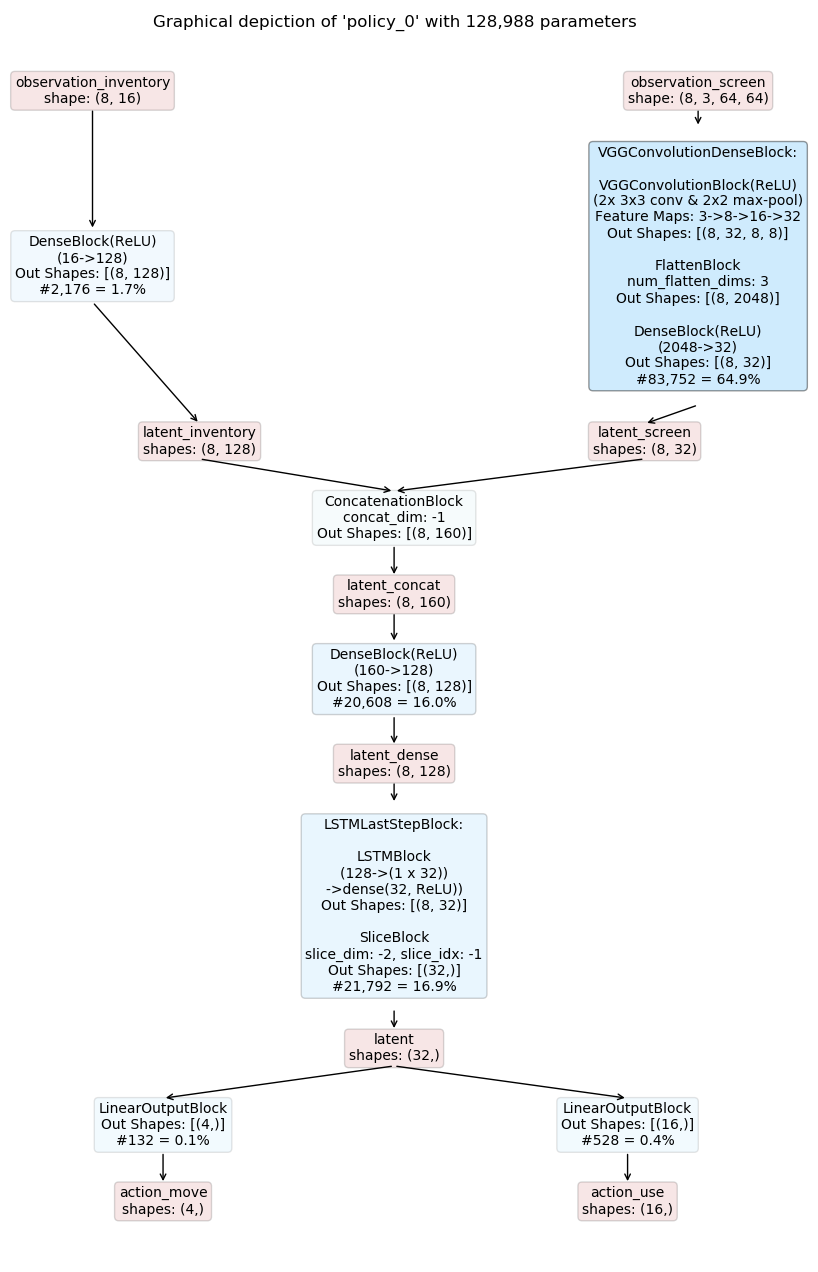
The observation space is defined as:
observation_screen : a 64 x 64 RGB image
observation_inventory : a 16-dimensional feature vector
The action space is defined as:
action_move : a categorical action with four options deciding to move [UP, DOWN, LEFT, RIGHT]
action_use : a 16-dimensional multi-binary action deciding which item to use from inventory
Since we are interested in building a policy and critic network, where both networks should have the same embedding structure we can create a base or latent space template:
"""Shows how to use the custom model composer to build a complex custom embedding networks."""
from collections import OrderedDict
from typing import Dict, Union, Sequence, List
import torch.nn as nn
from maze.perception.blocks.feed_forward.dense import DenseBlock
from maze.perception.blocks.general.concat import ConcatenationBlock
from maze.perception.blocks.joint_blocks.lstm_last_step import LSTMLastStepBlock
from maze.perception.blocks.joint_blocks.vgg_conv_dense import VGGConvolutionDenseBlock
class CustomComplexLatentNet:
"""Simple feed forward policy network.
:param obs_shapes: The shapes of all observations as a dict.
:param non_lin: The nonlinear activation to be used.
:param hidden_units: A list of units per hidden layer.
"""
def __init__(self, obs_shapes: Dict[str, Sequence[int]],
non_lin: Union[str, type(nn.Module)], hidden_units: List[int]):
self.obs_shapes = obs_shapes
# Maze relies on dictionaries to represent the inference graph
self.perception_dict = OrderedDict()
# build latent feature embedding block
self.perception_dict['latent_inventory'] = DenseBlock(
in_keys='observation_inventory', out_keys='latent_inventory', in_shapes=obs_shapes['observation_inventory'],
hidden_units=[128], non_lin=non_lin)
# build latent pixel embedding block
self.perception_dict['latent_screen'] = VGGConvolutionDenseBlock(
in_keys='observation_screen', out_keys='latent_screen', in_shapes=obs_shapes['observation_screen'],
non_lin=non_lin, hidden_channels=[8, 16, 32], hidden_units=[32])
# Concatenate latent features
self.perception_dict['latent_concat'] = ConcatenationBlock(
in_keys=['latent_inventory', 'latent_screen'], out_keys='latent_concat',
in_shapes=self.perception_dict['latent_inventory'].out_shapes() +
self.perception_dict['latent_screen'].out_shapes(), concat_dim=-1)
# Add latent dense block
self.perception_dict['latent_dense'] = DenseBlock(
in_keys='latent_concat', out_keys='latent_dense', hidden_units=hidden_units, non_lin=non_lin,
in_shapes=self.perception_dict['latent_concat'].out_shapes()
)
# Add recurrent block
self.perception_dict['latent'] = LSTMLastStepBlock(
in_keys='latent_dense', out_keys='latent', in_shapes=self.perception_dict['latent_dense'].out_shapes(),
hidden_size=32, num_layers=1, bidirectional=False, non_lin=non_lin
)
Now using the template we can create the policy:
"""Shows how to use the custom model composer to build a complex custom policy networks."""
from typing import Dict, Union, Sequence, List
import numpy as np
import torch
import torch.nn as nn
from docs.source.policy_and_value_networks.code_snippets.custom_complex_latent_net import \
CustomComplexLatentNet
from maze.perception.blocks.inference import InferenceBlock
from maze.perception.blocks.output.linear import LinearOutputBlock
from maze.perception.weight_init import make_module_init_normc
class CustomComplexPolicyNet(nn.Module, CustomComplexLatentNet):
"""Simple feed forward policy network.
:param obs_shapes: The shapes of all observations as a dict.
:param action_logits_shapes: The shapes of all actions as a dict structure.
:param non_lin: The nonlinear activation to be used.
:param hidden_units: A list of units per hidden layer.
"""
def __init__(self, obs_shapes: Dict[str, Sequence[int]], action_logits_shapes: Dict[str, Sequence[int]],
non_lin: Union[str, type(nn.Module)], hidden_units: List[int]):
nn.Module.__init__(self)
CustomComplexLatentNet.__init__(self, obs_shapes, non_lin, hidden_units)
# build action heads
for action_key, action_shape in action_logits_shapes.items():
self.perception_dict[action_key] = LinearOutputBlock(
in_keys='latent', out_keys=action_key, in_shapes=self.perception_dict['latent'].out_shapes(),
output_units=int(np.prod(action_shape)))
# build inference block
in_keys = list(self.obs_shapes.keys())
self.perception_net = InferenceBlock(
in_keys=in_keys, out_keys=list(action_logits_shapes.keys()), perception_blocks=self.perception_dict,
in_shapes=[self.obs_shapes[key] for key in in_keys])
# apply weight init
self.perception_net.apply(make_module_init_normc(1.0))
for action_key in action_logits_shapes.keys():
self.perception_dict[action_key].apply(make_module_init_normc(0.01))
def forward(self, in_tensor_dict: Dict[str, torch.Tensor]) -> Dict[str, torch.Tensor]:
"""Compute forward pass through the network.
:param in_tensor_dict: Input tensor dict.
:return: The computed output of the network.
"""
return self.perception_net(in_tensor_dict)
And the critic:
"""Shows how to use the custom model composer to build a complex custom value networks."""
from typing import Dict, Union, Sequence, List
import torch
import torch.nn as nn
from docs.source.policy_and_value_networks.code_snippets.custom_complex_latent_net import \
CustomComplexLatentNet
from maze.perception.blocks.inference import InferenceBlock
from maze.perception.blocks.output.linear import LinearOutputBlock
from maze.perception.weight_init import make_module_init_normc
class CustomComplexCriticNet(nn.Module, CustomComplexLatentNet):
"""Simple feed forward policy network.
:param obs_shapes: The shapes of all observations as a dict.
:param non_lin: The nonlinear activation to be used.
:param hidden_units: A list of units per hidden layer.
"""
def __init__(self, obs_shapes: Dict[str, Sequence[int]],
non_lin: Union[str, type(nn.Module)], hidden_units: List[int]):
nn.Module.__init__(self)
CustomComplexLatentNet.__init__(self, obs_shapes, non_lin, hidden_units)
# build action heads
self.perception_dict['value'] = LinearOutputBlock(
in_keys='latent', out_keys='value', in_shapes=self.perception_dict['latent'].out_shapes(),
output_units=1)
# build inference block
in_keys = list(self.obs_shapes.keys())
self.perception_net = InferenceBlock(
in_keys=in_keys, out_keys='value', in_shapes=[self.obs_shapes[key] for key in in_keys],
perception_blocks=self.perception_dict)
# apply weight init
self.perception_net.apply(make_module_init_normc(1.0))
self.perception_dict['value'].apply(make_module_init_normc(0.01))
def forward(self, in_tensor_dict: Dict[str, torch.Tensor]) -> Dict[str, torch.Tensor]:
"""Compute forward pass through the network.
:param in_tensor_dict: Input tensor dict.
:return: The computed output of the network.
"""
return self.perception_net(in_tensor_dict)
An example config for the model composer could then look like this:
# @package model
# specify the custom model composer by reference
type: maze.perception.models.custom_model_composer.CustomModelComposer
# Specify distribution mapping
# (here we use a default distribution mapping)
distribution_mapper_config: {}
policy:
type: maze.perception.models.policies.ProbabilisticPolicyComposer
networks:
# specify the policy network we would like to use, by reference
- type: docs.source.policy_and_value_networks.code_snippets.custom_complex_policy_net.CustomComplexPolicyNet
# specify the parameters of our model
non_lin: torch.nn.ReLU
hidden_units: [128]
critic:
# first specify the critic type (single step in this example)
type: maze.perception.models.critics.StateCriticComposer
networks:
# specify the critic we would like to use, by reference
- type: docs.source.policy_and_value_networks.code_snippets.custom_complex_critic_net.CustomComplexCriticNet
# specify the parameters of our model
non_lin: torch.nn.ReLU
hidden_units: [128]
The resulting inference graphs for a recurrent actor-critic model are shown below. Note that the models are identical except for the output layers due to the shared base model.
Example 3: Custom Networks with (plain PyTorch) Python¶
Finally, let’s have a look at how we can create a custom model without using any Maze-Perception Components. As already mentioned, we still have to specify the constructor arguments obs_shapes and action_logits_shapes but do not need to use them. Considering again OpenAI Gym’s CartPole Env the models could look like this:
The policy model:
"""Shows how to create a custom cartpole model using no maze perception components."""
from typing import Dict, Sequence
import torch
import torch.nn as nn
import torch.nn.functional as F
class CustomPlainCartpolePolicyNet(nn.Module):
"""Simple feed forward policy network.
:param obs_shapes: The shapes of all observations as a dict.
:param action_logits_shapes: The shapes of all actions as a dict structure.
:param hidden_layer_0: The number of units in layer 0.
:param hidden_layer_1: The number of units in layer 1.
:param use_bias: Specify whether to use a bias in the linear layers.
"""
def __init__(self, obs_shapes: Dict[str, Sequence[int]], action_logits_shapes: Dict[str, Sequence[int]],
hidden_layer_0: int, hidden_layer_1: int, use_bias: bool):
nn.Module.__init__(self)
self.observation_name = list(obs_shapes.keys())[0]
self.action_name = list(action_logits_shapes.keys())[0]
self.l0 = nn.Linear(4, hidden_layer_0, bias=use_bias)
self.l1 = nn.Linear(hidden_layer_0, hidden_layer_1, bias=use_bias)
self.l2 = nn.Linear(hidden_layer_1, 2, bias=use_bias)
def reset_parameters(self) -> None:
"""Reset the parameters of the Model"""
self.l0.reset_parameters()
self.l1.reset_parameters()
self.l1.reset_parameters()
def forward(self, in_tensor_dict: Dict[str, torch.Tensor]) -> Dict[str, torch.Tensor]:
"""Compute forward pass through the network.
:param in_tensor_dict: Input tensor dict.
:return: The computed output of the network.
"""
# Retrieve the observation tensor from the input dict
xx_tensor = in_tensor_dict[self.observation_name]
# Compute the forward pass thorough the network
xx_tensor = F.relu(self.l0(xx_tensor))
xx_tensor = F.relu(self.l1(xx_tensor))
xx_tensor = self.l2(xx_tensor)
# Create the output dictionary with the computed model output
out = dict({self.action_name: xx_tensor})
return out
And the critic model as:
"""Shows how to create a custom cartpole model using no maze perception components."""
from typing import Dict, Sequence
import torch
import torch.nn as nn
import torch.nn.functional as F
class CustomPlainCartpoleCriticNet(nn.Module):
"""Simple feed forward critic network.
:param obs_shapes: The shapes of all observations as a dict.
:param hidden_layer_0: The number of units in layer 0.
:param hidden_layer_1: The number of units in layer 1.
:param use_bias: Specify whether to use a bias in the linear layers.
"""
def __init__(self, obs_shapes: Dict[str, Sequence[int]],
hidden_layer_0: int, hidden_layer_1: int, use_bias: bool):
nn.Module.__init__(self)
self.observation_name = list(obs_shapes.keys())[0]
self.l0 = nn.Linear(4, hidden_layer_0, bias=use_bias)
self.l1 = nn.Linear(hidden_layer_0, hidden_layer_1, bias=use_bias)
self.l2 = nn.Linear(hidden_layer_1, 1, bias=use_bias)
def reset_parameters(self) -> None:
"""Reset the parameters of the Model"""
self.l0.reset_parameters()
self.l1.reset_parameters()
self.l1.reset_parameters()
def forward(self, in_tensor_dict: Dict[str, torch.Tensor]) -> Dict[str, torch.Tensor]:
"""Compute forward pass through the network.
:param in_tensor_dict: Input tensor dict.
:return: The computed output of the network.
"""
# Retrieve the observation tensor from the input dict
xx_tensor = in_tensor_dict[self.observation_name]
# Compute the forward pass thorough the network
xx_tensor = F.relu(self.l0(xx_tensor))
xx_tensor = F.relu(self.l1(xx_tensor))
xx_tensor = self.l2(xx_tensor)
# Create the output dictionary with the computed model output
out = dict({'value': xx_tensor})
return out
An example config for the model composer could then look like this:
# @package model
# specify the custom model composer by reference
type: maze.perception.models.custom_model_composer.CustomModelComposer
# Specify distribution mapping
# (here we use a default distribution mapping)
distribution_mapper_config: {}
policy:
# first specify the policy type
type: maze.perception.models.policies.ProbabilisticPolicyComposer
# specify the policy network(s) we would like to use, by reference
networks:
- type: docs.source.policy_and_value_networks.code_snippets.custom_plain_cartpole_policy_net.CustomPlainCartpolePolicyNet
# specify the parameters of our model
hidden_layer_0: 16
hidden_layer_1: 32
use_bias: True
critic:
# first specify the critic type (here a state value critic)
type: maze.perception.models.critics.StateCriticComposer
# specify the critic network(s) we would like to use, by reference
networks:
- type: docs.source.policy_and_value_networks.code_snippets.custom_plain_cartpole_critic_net.CustomPlainCartpoleCriticNet
# specify the parameters of our model
hidden_layer_0: 16
hidden_layer_1: 32
use_bias: True
Note
Since we do not use the inference block in this example, no visual representation of the model can be rendered.
Where to Go Next¶
You can read up on our general introduction to the Perception Module.
We explain how to use the template model builder in case the you just want to get started with training.